http://web.cortland.edu/moataz.emam/
This page is the official companion
website for the book
|
COVARIANT PHYSICS From Classical Mechanics To General Relativity & Beyond |
|

Published March
2nd 2021 by Oxford University Press©, this textbook
is currently in its first edition. The target readership includes third or
fourth year undergraduate physics majors, first year graduate students,
self-learners, as well as other interested parties such as engineers. The book
discusses the modern methods of theoretical physics involving mainly the
general theory of relativity, but also goes beyond that into topics such as the
theory of classical fields, the use of differential forms in theoretical
physics, and modified theories of gravity. The basis of the approach is the
principle of covariance, rarely used or discussed at such a level. The book
requires, intentionally, a minimum of mathematics and physics preparation. Any
student with a background of multivariable calculus, a bit of linear algebra
(mainly just matrices, determinants, and their properties) and some
introductory physics should be able to navigate most of the book (Junior/senior
level classical mechanics and electrodynamics would help in some parts
of the book but are not necessary, as these parts may be skipped at first
reading without affecting the general flow). It is designed to get the student
to be able to read and understand most modern research papers in the field of
spacetime physics, which may include Supergravity (minus the supersymmetric
part), as well as prepare them for doing research under supervision.
· The
site is a continuous work in progress. Listed below is the updated errata
for the first edition. The author would like to extend his gratitude to the
readers who discovered some of these errors post publication (Gh. Shahali,
Sunjiv Varsani, Ferreño Blanco, Toby Baldwin, Kevin Coffey, Miles Angelo Sodejana,
and Omar Mahmoud).
·
As the reader progresses into
the book, s/he will find that the exercises become increasingly longer, not
more difficult, just longer. For example, once the reader calculates a few
Christoffel symbols (or, even worse, components of Riemann’s curvature tensor)
it becomes less instructive and more tedious to calculate more, especially as
the metrics become larger and larger. At this point the reader should, and as a
matter of fact is encouraged to, use the computer to work out these things.
There are many ways one may do so, depending on what you are comfortable with.
For example, you may write codes in Python or C++ if you are proficient in
those. Or you can use preprepared symbolic manipulation packages in
Mathematica, Maple, or MatLab. There are many such packages available online
for free. For example, many useful such packages may be found in the Mathematica Repository. Just search
for what you need.
Errata for the
first edition:
Click here for a printable version
1)
Page 13: In
equation (1.25) the third line up from the bottom the first two terms should
be: dρ2sin2φ+ ρ2dφ2cos2φ.
2)
Page 27: Part 1
of Exercise 1.13 should read “where the coefficients aij are
constants satisfying aij =aji.”
3)
Page 46: The
argument around equations (2.15) and (2.16) is wrong. What it should say is
that the components of the vector V do not change under the
transformation (xi à xi
+ ai) and then elaborate further. Since this is not important
to our discussion, I have decided just to recommend removing between “Although
we will mostly focus …” and equation (2.16) inclusive. Similarly and for the
same reason, on the bottom of page 52 remove between “As pointed out earlier …”
and equation (2.41) inclusive.
4)
Page 45:
Equation 2.11 has the minus sign in the wrong place it should be:
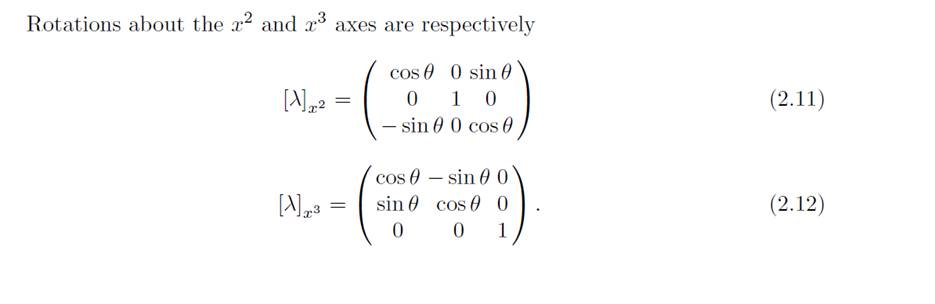
5)
Page 52:
Footnote 8, 2nd line: "Since each index counts from 1 to 3,
each of the nine equations contains nine terms,
giving a total of 27 terms altogether." the total number of terms
should be 81, not 27.
6)
Page 58:
Footnote 11, the phrases “physical basis” and “natural basis” should be
switched.
7)
Page 80:
Equation (3.6) the last term dxi` should be replaced with dx
j (i.e. i` → j).
8)
Page 81: From
the top of the page (right before equation 3.7) to right before equation (3.10)
should be replaced with:

9)
Page 111:
Exercise 3.26 should be two dimensional. The velocity v should be
replaced with components (5, 2, 0). The words “except in three dimensions” to
be removed. Similarly, problem 3.27 on page 113 the same words should be
removed. Also change exercise 4.7-3 to make it two dimensional by dropping the z
component of the velocity.
10)
Page 123:
Equation (4.26) the left hand side should have the same indices on U and
V.
11)
Page 130:
Exercise 4.7-2, let v=(0.7c, 0.5c, 0.2c) instead of
the given numbers.
12)
Page 136:
Exercise 4.13 should be entirely replaced by: An observer at rest in some orthogonal frame of reference
O sees the location of an event happening at x = 500m and ct = 600m. Another
observer O' on a frame of reference traveling at a speed v = 0.3639c with
respect to O sees the same event at different spacetime coordinates. Draw an
accurate to-scale spacetime diagram to describe the situation and find x' and
ct' from it; i.e. the location of the event as measured by O'. Verify your
result analytically using the Lorentz transformations. Your graphical results
should be within about 20% of your analytical ones.
13) Page 170: 3rd line: “… Galileo, who proved
it experimentally over 500 years ago.” should be 400 years.
14) Page 187: The metric (5.61) is missing factors of r
in each term. It should be as follows. The form (5.67) is correct.

15) Page 206: The second line, dΩ should be
squared.
16) Page 214: in equation (6.18) the last term should be
2/c2 instead of 2/c.
17) Page 217: Equation (6.25): the last component of the
4-velocity should be just ω, NOT Rω since we are using natural
basis vectors.
18) Page 224: In the line before equation (6.52) and again
the line after equation (6.54) the definition of E should be E=cP0.
19) Page 225: in equation (6.56) the last term has a
missing factor of c, i.e. it should be -cgi0Pi.
20) Page 234: Exercise 6.25. It is enough to do the first
part of this problem. The second part needs revision.
21) Page 237: Exercise 6.28, although probably obvious,
let me just clarify that the second calculation should be for the case of
constant angle θ, i.e. the time derivative of θ is
zero.
22) Page 243: 2nd paragraph, 3rd
line, the reference FIG [5.11] should be FIG [6.9].
23) Page 245: The first paragraph of section 6.2.7, the
reference “Starting with (6.110)” should be (6.109). Same on page 246 in the
line before equation (6.125).
24) Page 248: 2nd line after Fig. [6.10], the
place of aphelion and perihelion should be exchanged. Same for Fig. [6.10] on
the same page and exercise 6.44.
25) Page 263: in equation (7.13) dyκ
should be dxκ.
26) Page 265: The discussion towards the bottom of the
page is incorrect, the components of the Riemann curvature tensor do
diverge at the Schwarzschild radius if one uses Schwarzschild coordinates. The
correct argument is that only scalar invariants, like Kretschmann’s
scalar and the Ricci scalar are well behaved at r = rs
in any system of coordinates describing a Schwarzschild manifold.
27) Page 291: Second line after equation (8.10): "it
evaluates the variation of x at the fixed initial and starting
points." Should be initial and final points.
28) Page 317: Equation 8.142. The M subscript in
the left hand side should be removed.
29) Page 318: Equation 8.146. The second term in the
parenthesis should be multiplied by ¼ gμν.
30) Page 353: The sentence “The bein language, then, is a
formulation of geometry to the coordinate/metric-based formulation we have been
working with, and as such the entire structure of general covariance can be
rewritten in terms of this.” should be rewritten to “The bein language, then,
is a formulation of geometry equivalent to the coordinate/metric-based
formulation we have been working with, and as such the entire structure of
general covariance can be rewritten in terms of it.”.
The author may
be reached via his online presence:
Linkedin, Facebook, X (formerly Twitter), Academia.edu, Amazon, YouTube, or his Blog.